Introduction
The aim of the lightweight platform independent C++ toolbox Simox is to provide a set of algorithms for 3D simulation of robot systems, sampling based motion planning and grasp planning. Simox consists of three libraries (VirtualRobot, Saba and GraspStudio) and numerous examples showing how these libraries can be used to build complex tools in the context of mobile manipulation.
Further information and documentation can be found at the wiki pages: https://gitlab.com/Simox/simox/-/wikis/home
SimoxUtility
SimoxUtility is a utility library providing general-purpose code tools to help working with, among others, C++ strings and containers, maths (e.g. pose, radians and degrees, scaling, clamping, periodic mean, ...), data file formats (e.g. JSON, XMl), colors and colormaps, as well as shapes like axis-aligned and oriented (bounding) boxes.
VirtualRobot
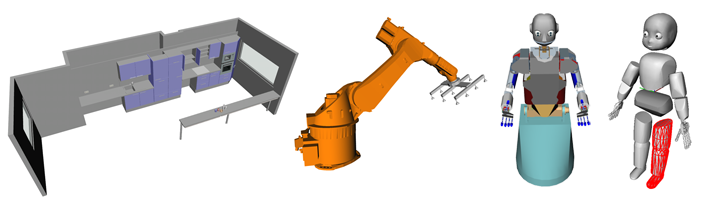
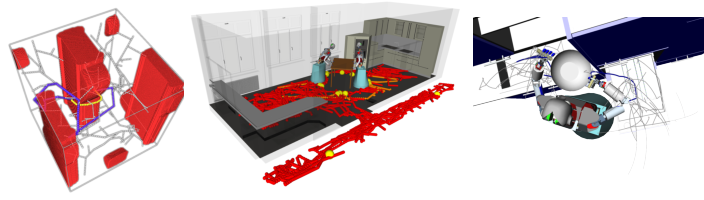
The library VirtualRobot can be used to define complex robot systems, which may cover multiple robots with many degrees of freedom. The robot structure and its visualization can be easily defined via XML files and environments with obstacles and objects to manipulate are supported. Further, basic robot simulation components, as Jacobian computations and generic Inverse Kinematics (IK) solvers, are offered by the library. Beyond that, extended features like tools for analyzing the reachable workspace for robotic manipulators or contact determination for grasping are included.
Motion Planning
With Saba, a library for planning collision-free motions is offered, which directly incorporates with the data provided by VirtualRobot. The algorithms cover state-of-the-art implementations of sampling-based motion planning approaches (e.g. Rapidly-exploring Random Trees) and interfaces that allow to conveniently implement own planners. Since Saba was designed for planning in high-dimensional configuration spaces, complex planning problems for robots with a high number of degrees of freedom (DoF) can be solved efficiently.
Grasp Planning
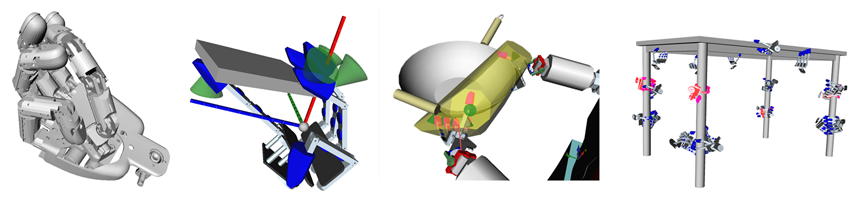
GraspStudio offers possibilities to compute the grasp quality for generic end-effector definitions, e.g. a humanoid hand. The implemented 6D wrench-space computations can be used to easily (and quickly) determine the quality of an applied grasp to an object. Furthermore, the implemented planners are able to generate grasp maps for given objects automatically.
Installation, tutorials and documentation
Since complex frameworks have to incorporate with several libraries in order to provide full functionality, several issues may arise when setting up the environment, such as dependency problems, incompatible library versions or even non-existing ports of needed libraries for the used operating systems. Hence, only a limited set of libraries are used by the Simox core in order to make it compile. Extended functionality (e.g. visualization) can be turned off in order to allow Simox compiling on most platforms. Further dependencies are encapsulated with interfaces, making it easy to exchange e.g. the collision engine or the visualization functionality. As a reference implementation Simox offers Coin3D/SoQt-based visualization support.
Please have a look at the wiki pages: https://gitlab.com/Simox/simox/-/wikis/home
