|
| | KinematicChain (const std::string &name, RobotPtr robot, const std::vector< RobotNodePtr > &robotNodes, RobotNodePtr tcp=RobotNodePtr(), RobotNodePtr kinematicRoot=RobotNodePtr()) |
| |
| | ~KinematicChain () override |
| |
| RobotNodeSetPtr | clone (RobotPtr newRobot, const RobotNodePtr newKinematicRoot=RobotNodePtr()) |
| |
| bool | hasRobotNode (const RobotNodePtr &robotNode) const |
| |
| bool | hasRobotNode (const std::string &nodeName) const |
| |
| int | getRobotNodeIndex (const RobotNodePtr &robotNode) const |
| |
| int | getRobotNodeIndex (const std::string &nodeName) const |
| |
| const std::vector< RobotNodePtr > & | getAllRobotNodes () const |
| |
| std::vector< std::string > | getNodeNames () const |
| |
| std::vector< float > | getNodeLimitsLo () const |
| |
| std::vector< float > | getNodeLimitsHi () const |
| |
| RobotNodePtr | getKinematicRoot () const |
| |
| void | setKinematicRoot (RobotNodePtr robotNode) |
| |
| RobotNodePtr | getTCP () const |
| |
| void | print () const |
| | Print out some information. More...
|
| |
| unsigned int | getSize () const override |
| |
| std::vector< float > | getJointValues () const |
| |
| Eigen::VectorXf | getJointValuesEigen () const |
| |
| void | getJointValues (std::vector< float > &fillVector) const |
| |
| void | getJointValues (Eigen::VectorXf &fillVector) const |
| |
| void | getJointValues (RobotConfigPtr fillVector) const |
| |
| std::map< std::string, float > | getJointValueMap () const |
| |
| void | respectJointLimits (std::vector< float > &jointValues) const |
| |
| void | respectJointLimits (Eigen::VectorXf &jointValues) const |
| |
| bool | checkJointLimits (std::vector< float > &jointValues, bool verbose=false) const |
| |
| bool | checkJointLimits (Eigen::VectorXf &jointValues, bool verbose=false) const |
| |
| virtual void | setJointValues (const std::vector< float > &jointValues) |
| |
| virtual void | setJointValues (const Eigen::VectorXf &jointValues) |
| |
| virtual void | setJointValues (const RobotConfigPtr jointValues) |
| |
| RobotNodePtr & | operator[] (int i) |
| |
| const RobotNodePtr & | getNode (int i) const |
| |
| const RobotNodePtr & | getNode (const std::string &nodeName) const |
| |
| auto | begin () |
| |
| auto | end () |
| |
| auto | begin () const |
| |
| auto | end () const |
| |
| unsigned int | size () const |
| |
| RobotPtr | getRobot () |
| |
| bool | isKinematicChain () |
| |
| KinematicChainPtr | toKinematicChain () |
| |
| virtual void | highlight (VisualizationPtr visualization, bool enable) |
| |
| virtual int | getNumFaces (bool collisionModel=false) |
| |
| float | getMaximumExtension () |
| |
| Eigen::Vector3f | getCoM () |
| |
| float | getMass () |
| |
| bool | nodesSufficient (std::vector< RobotNodePtr > nodes) const |
| | Returns true, if nodes (only name strings are checked) are sufficient for building this rns. More...
|
| |
| std::string | toXML (int tabs) override |
| |
| bool | addSceneObject (SceneObjectPtr sceneObject) override |
| | this is forbidden for RobotNodeSets, a call will throw an exception More...
|
| |
| bool | addSceneObjects (SceneObjectSetPtr sceneObjectSet) override |
| | this is forbidden for RobotNodeSets, a call will throw an exception More...
|
| |
| bool | addSceneObjects (RobotNodeSetPtr robotNodeSet) override |
| | this is forbidden for RobotNodeSets, a call will throw an exception More...
|
| |
| bool | addSceneObjects (std::vector< RobotNodePtr > robotNodes) override |
| | this is forbidden for RobotNodeSets, a call will throw an exception More...
|
| |
| bool | removeSceneObject (SceneObjectPtr sceneObject) override |
| | this is forbidden for RobotNodeSets, a call will throw an exception More...
|
| |
| bool | mirror (const RobotNodeSet &targetNodeSet) |
| |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | SceneObjectSet (const std::string &name="", CollisionCheckerPtr colChecker=CollisionCheckerPtr()) |
| |
| virtual | ~SceneObjectSet () |
| |
| std::string | getName () const |
| |
| virtual void | addSceneObjects (std::vector< SceneObjectPtr > sceneObjects) |
| |
| virtual void | addSceneObjects (std::vector< ManipulationObjectPtr > sceneObjects) |
| |
| CollisionCheckerPtr | getCollisionChecker () |
| |
| std::vector< CollisionModelPtr > | getCollisionModels () |
| |
| std::vector< SceneObjectPtr > | getSceneObjects () |
| |
| virtual SceneObjectPtr | getSceneObject (unsigned int nr) |
| |
| virtual bool | hasSceneObject (SceneObjectPtr sceneObject) |
| | Returns true, if sceneObject is part of this set. More...
|
| |
| virtual bool | getCurrentSceneObjectConfig (std::map< SceneObjectPtr, Eigen::Matrix4f > &storeConfig) |
| | fills the current globalPose of all associated sceneobjects to map. More...
|
| |
| SceneObjectSetPtr | clone (const std::string &newName="") |
| |
| SceneObjectSetPtr | clone (const std::string &newName, CollisionCheckerPtr newColChecker) |
| |
| ObstaclePtr | createStaticObstacle (const std::string &name) |
| |
|
| typedef std::vector< RobotNodePtr > | NodeContainerT |
| |
| typedef NodeContainerT::iterator | NodeContainerIterT |
| |
| static RobotNodeSetPtr | createRobotNodeSet (RobotPtr robot, const std::string &name, const std::vector< std::string > &robotNodeNames, const std::string &kinematicRootName="", const std::string &tcpName="", bool registerToRobot=false) |
| |
| static RobotNodeSetPtr | createRobotNodeSet (RobotPtr robot, const std::string &name, const std::vector< RobotNodePtr > &robotNodes, const RobotNodePtr kinematicRoot=RobotNodePtr(), const RobotNodePtr tcp=RobotNodePtr(), bool registerToRobot=false) |
| |
| static RobotNodeSetPtr | createRobotNodeSet (RobotPtr robot, const std::string &name, const std::vector< RobotNodeSetPtr > &robotNodes, const RobotNodePtr kinematicRoot=RobotNodePtr(), const RobotNodePtr tcp=RobotNodePtr(), bool registerToRobot=false) |
| | Merges the node sets (takes care of only adding each node once) More...
|
| |
| bool | isKinematicRoot (RobotNodePtr robotNode) |
| |
| | RobotNodeSet (const std::string &name, RobotWeakPtr robot, const std::vector< RobotNodePtr > &robotNodes, const RobotNodePtr kinematicRoot=RobotNodePtr(), const RobotNodePtr tcp=RobotNodePtr()) |
| |
| void | destroyData () |
| | delete all data More...
|
| |
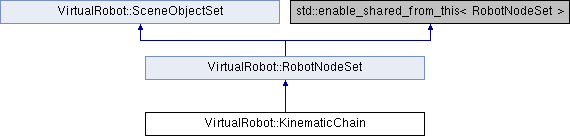
A KinematicChain is a RobotNodeSet that fulfills some constraints on the covered RobotNodes. The nodes form a kinematic chain, which means that two successive nodes are uniquely connected in the kinematic tree of the robot. E.g. node i and node i+1 are parent and child or node i+1 is child of a child of node i, etc.
- See also
- RobotNodeSet
 Public Member Functions inherited from VirtualRobot::RobotNodeSet
Public Member Functions inherited from VirtualRobot::RobotNodeSet