Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | PoseQualityMeasurement (VirtualRobot::RobotNodeSetPtr rns) |
| ~PoseQualityMeasurement () | |
| virtual float | getPoseQuality () |
| virtual float | getPoseQuality (const Eigen::VectorXf &direction) |
| void | setVerbose (bool v) |
| VirtualRobot::RobotNodeSetPtr | getRNS () |
| std::string | getName () |
| A string that identifies the type of pose quality measure. More... | |
| virtual bool | consideringJointLimits () |
| Indicates if joint limits are considered. More... | |
| virtual void | setObstacleDistanceVector (const Eigen::Vector3f &directionSurfaceToObstance) |
| virtual void | disableObstacleDistance () |
| virtual PoseQualityMeasurementPtr | clone (RobotPtr newRobot) |
Protected Attributes | |
| std::string | name |
| VirtualRobot::RobotNodeSetPtr | rns |
| bool | considerObstacle |
| Eigen::Vector3f | obstacleDir |
| bool | verbose |
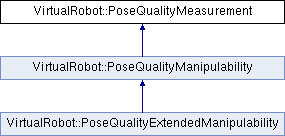
Detailed Description
An interface definition for quality measurements of poses.
Constructor & Destructor Documentation
◆ PoseQualityMeasurement()
| VirtualRobot::PoseQualityMeasurement::PoseQualityMeasurement | ( | VirtualRobot::RobotNodeSetPtr | rns | ) |
◆ ~PoseQualityMeasurement()
|
default |
Member Function Documentation
◆ clone()
|
virtual |
Reimplemented in VirtualRobot::PoseQualityExtendedManipulability, and VirtualRobot::PoseQualityManipulability.
◆ consideringJointLimits()
|
virtual |
Indicates if joint limits are considered.
Reimplemented in VirtualRobot::PoseQualityExtendedManipulability, and VirtualRobot::PoseQualityManipulability.
◆ disableObstacleDistance()
|
virtual |
◆ getName()
| std::string VirtualRobot::PoseQualityMeasurement::getName | ( | ) |
A string that identifies the type of pose quality measure.
◆ getPoseQuality() [1/2]
|
virtual |
The main method for determining the pose quality. The current configuration of the corresponding RNS is analyzed and the quality is returned. See derived classes for details.
Reimplemented in VirtualRobot::PoseQualityExtendedManipulability, and VirtualRobot::PoseQualityManipulability.
◆ getPoseQuality() [2/2]
|
virtual |
The quality is determined for a given Cartesian direction. The current configuration of the corresponding RNS is analyzed and the quality is returned. See derived classes for details.
- Parameters
-
direction A 3d or 6d vector with the Cartesian direction to investigate.
Reimplemented in VirtualRobot::PoseQualityExtendedManipulability, and VirtualRobot::PoseQualityManipulability.
◆ getRNS()
| VirtualRobot::RobotNodeSetPtr VirtualRobot::PoseQualityMeasurement::getRNS | ( | ) |
Returns the RobotNodeSte that is used for computing the manipulability.
◆ setObstacleDistanceVector()
|
virtual |
Consider obstacles. Here, the shortest distance on the surface of the RNS to an obstacle is set (in TCP coords). This obstacle vector may be considered by any further calculations (depending on the implementation).
◆ setVerbose()
| void VirtualRobot::PoseQualityMeasurement::setVerbose | ( | bool | v | ) |
Field Documentation
◆ considerObstacle
|
protected |
◆ name
|
protected |
◆ obstacleDir
|
protected |
◆ rns
|
protected |
◆ verbose
|
protected |
