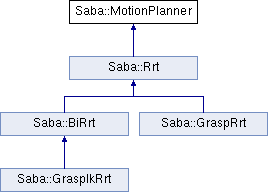
An abstract base class of a motion planner. More...
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | MotionPlanner (CSpacePtr cspace) |
| virtual | ~MotionPlanner () |
| destructor More... | |
| virtual bool | plan (bool bQuiet=false)=0 |
| CSpacePathPtr | getSolution () |
| void | setMaxCycles (unsigned int mc) |
| Eigen::VectorXf | getStartConfig () |
| return start configuration More... | |
| Eigen::VectorXf | getGoalConfig () |
| return goal configuration More... | |
| virtual void | reset () |
| reset the planner More... | |
| virtual bool | setStart (const Eigen::VectorXf &c) |
| set start configuration More... | |
| virtual bool | setGoal (const Eigen::VectorXf &c) |
| set goal configuration More... | |
| unsigned int | getNrOfCycles () |
| check that planner is initialized More... | |
| virtual void | printConfig (bool printOnlyParams=false) |
| CSpacePtr | getCSpace () |
| The CSpace. More... | |
| virtual void | stopExecution () |
| void | setName (std::string sName) |
| Give the planner a name. More... | |
| std::string | getName () |
| The name of the planner. More... | |
| float | getPlanningTimeMS () |
| virtual bool | isInitialized () |
| returns true, when start and goal config have been set More... | |
| void | setPlanningTimeout (float timeoutMs) |
Protected Member Functions | |
| virtual bool | createSolution (bool bQuiet=false)=0 |
| create the solution More... | |
Protected Attributes | |
| CSpacePtr | cspace |
| the cspace on which are operating More... | |
| CSpacePathPtr | solution |
| the solution More... | |
| bool | stopSearch |
| indicates that the search should be interrupted More... | |
| unsigned int | dimension |
| dimension of c-space More... | |
| Eigen::VectorXf | startConfig |
| start config More... | |
| bool | startValid |
| Eigen::VectorXf | goalConfig |
| goal config More... | |
| bool | goalValid |
| unsigned int | maxCycles |
| maximum cycles for searching More... | |
| unsigned int | cycles |
| current cycles done in the run method More... | |
| std::string | name |
| Name of this planner (standard: "Motion Planner") More... | |
| float | planningTime |
| float | planningTimeout |
| Planning time in milliseconds. More... | |
Detailed Description
An abstract base class of a motion planner.
Constructor & Destructor Documentation
◆ MotionPlanner()
| Saba::MotionPlanner::MotionPlanner | ( | CSpacePtr | cspace | ) |
constructor
◆ ~MotionPlanner()
|
virtual |
destructor
Member Function Documentation
◆ createSolution()
|
protectedpure virtual |
create the solution
Implemented in Saba::Rrt, and Saba::BiRrt.
◆ getCSpace()
◆ getGoalConfig()
|
inline |
return goal configuration
◆ getName()
| std::string Saba::MotionPlanner::getName | ( | ) |
The name of the planner.
◆ getNrOfCycles()
|
inline |
check that planner is initialized
Return number of cycles that were needed for motion planning
◆ getPlanningTimeMS()
|
inline |
Returns the time needed for planning (in milliseconds).
◆ getSolution()
| CSpacePathPtr Saba::MotionPlanner::getSolution | ( | ) |
Returns the solution path.
◆ getStartConfig()
|
inline |
return start configuration
◆ isInitialized()
|
virtual |
returns true, when start and goal config have been set
◆ plan()
|
pure virtual |
do the planning (blocking method)
- Returns
- true if solution was found, otherwise false
Implemented in Saba::GraspRrt, Saba::Rrt, Saba::GraspIkRrt, and Saba::BiRrt.
◆ printConfig()
|
virtual |
Print setup of planner.
- Parameters
-
printOnlyParams If set the decorating start and end is skipped (can be used to print derived classes).
Reimplemented in Saba::GraspRrt, Saba::Rrt, Saba::GraspIkRrt, and Saba::BiRrt.
◆ reset()
|
virtual |
reset the planner
Reimplemented in Saba::GraspRrt, Saba::Rrt, Saba::GraspIkRrt, and Saba::BiRrt.
◆ setGoal()
|
virtual |
set goal configuration
Reimplemented in Saba::GraspRrt, Saba::Rrt, Saba::BiRrt, and Saba::GraspIkRrt.
◆ setMaxCycles()
| void Saba::MotionPlanner::setMaxCycles | ( | unsigned int | mc | ) |
Set maximal cycles. Initially set to 50000.
◆ setName()
| void Saba::MotionPlanner::setName | ( | std::string | sName | ) |
Give the planner a name.
◆ setPlanningTimeout()
| void Saba::MotionPlanner::setPlanningTimeout | ( | float | timeoutMs | ) |
◆ setStart()
|
virtual |
set start configuration
Reimplemented in Saba::GraspRrt, Saba::Rrt, and Saba::BiRrt.
◆ stopExecution()
|
inlinevirtual |
Sets stop flag, so that this planner can be notified to abort the search. Only useful for threaded planners.
Field Documentation
◆ cspace
|
protected |
the cspace on which are operating
◆ cycles
|
protected |
current cycles done in the run method
◆ dimension
|
protected |
dimension of c-space
◆ goalConfig
|
protected |
goal config
◆ goalValid
|
protected |
◆ maxCycles
|
protected |
maximum cycles for searching
◆ name
|
protected |
Name of this planner (standard: "Motion Planner")
◆ planningTime
|
protected |
◆ planningTimeout
|
protected |
Planning time in milliseconds.
◆ solution
|
protected |
the solution
◆ startConfig
|
protected |
start config
◆ startValid
|
protected |
◆ stopSearch
|
protected |
indicates that the search should be interrupted
