VirtualRobot::GenericIKSolver Class Reference
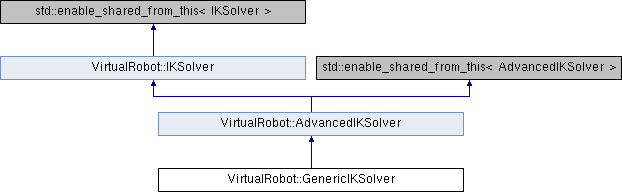
Inheritance diagram for VirtualRobot::GenericIKSolver:
Public Member Functions | |
| GenericIKSolver (RobotNodeSetPtr rns, JacobiProvider::InverseJacobiMethod invJacMethod=JacobiProvider::eSVD) | |
| Initialize an IK solver without collision detection. More... | |
| bool | solve (const Eigen::Matrix4f &globalPose, CartesianSelection selection=All, int maxLoops=1) override |
| GraspPtr | solve (ManipulationObjectPtr object, CartesianSelection selection=All, int maxLoops=1) override |
| bool | solve (ManipulationObjectPtr object, GraspPtr grasp, CartesianSelection selection=All, int maxLoops=1) override |
| void | setupJacobian (float stepSize, int maxLoops) |
| void | setVerbose (bool enable) |
| DifferentialIKPtr | getDifferentialIK () |
| void | setupTranslationalJoint (RobotNodePtr rn, float initialValue) |
 Public Member Functions inherited from VirtualRobot::AdvancedIKSolver Public Member Functions inherited from VirtualRobot::AdvancedIKSolver | |
| AdvancedIKSolver (RobotNodeSetPtr rns) | |
| Initialize a IK solver without collision detection. More... | |
| virtual void | collisionDetection (SceneObjectPtr avoidCollisionsWith) |
| virtual void | collisionDetection (ObstaclePtr avoidCollisionsWith) |
| virtual void | collisionDetection (SceneObjectSetPtr avoidCollisionsWith) |
| virtual void | collisionDetection (CDManagerPtr avoidCollision) |
| virtual void | setMaximumError (float maxErrorPositionMM=1.0f, float maxErrorOrientationRad=0.02) |
| virtual void | setReachabilityCheck (ReachabilityPtr reachabilitySpace) |
| virtual std::vector< float > | solveNoRNSUpdate (const Eigen::Matrix4f &globalPose, CartesianSelection selection=All) |
| virtual bool | solve (const Eigen::Vector3f &globalPosition) |
| virtual GraspPtr | sampleSolution (ManipulationObjectPtr object, GraspSetPtr graspSet, CartesianSelection selection=All, bool removeGraspFromSet=false, int maxLoops=1) |
| virtual bool | checkReachable (const Eigen::Matrix4f &globalPose) |
| RobotNodeSetPtr | getRobotNodeSet () |
| RobotNodePtr | getTcp () |
| void | setVerbose (bool enable) |
| Public Member Functions inherited from VirtualRobot::IKSolver | |
| IKSolver () | |
Protected Member Functions | |
| virtual void | _init () |
| This method is called by the constructor and can be used in derived classes for initialization. More... | |
| bool | _sampleSolution (const Eigen::Matrix4f &globalPose, CartesianSelection selection, int maxLoops=1) override |
| This method should deliver solution sample out of the set of possible solutions. More... | |
| bool | trySolve () |
| void | setJointsRandom () |
Protected Attributes | |
| RobotNodePtr | coordSystem |
| JacobiProvider::InverseJacobiMethod | invJacMethod |
| DifferentialIKPtr | jacobian |
| float | jacobianStepSize |
| int | jacobianMaxLoops |
| RobotNodePtr | translationalJoint |
| float | initialTranslationalJointValue |
| Protected Attributes inherited from VirtualRobot::AdvancedIKSolver | |
| RobotNodeSetPtr | rns |
| RobotNodePtr | tcp |
| CDManagerPtr | cdm |
| float | maxErrorPositionMM |
| float | maxErrorOrientationRad |
| ReachabilityPtr | reachabilitySpace |
| bool | verbose |
Additional Inherited Members | |
| Public Types inherited from VirtualRobot::IKSolver | |
| enum | CartesianSelection { X = 1, Y = 2, Z = 4, Position = 7, Orientation = 8, All = 15 } |
| Flags for the selection of the target components. More... | |
Constructor & Destructor Documentation
◆ GenericIKSolver()
| VirtualRobot::GenericIKSolver::GenericIKSolver | ( | RobotNodeSetPtr | rns, |
| JacobiProvider::InverseJacobiMethod | invJacMethod = JacobiProvider::eSVD |
||
| ) |
Initialize an IK solver without collision detection.
- Parameters
-
rns The robotNodes (i.e., joints) for which the Jacobians should be calculated. invJacMethod The method that should be used to compute the inverse of the Jacobian.
Member Function Documentation
◆ _init()
|
protectedvirtual |
This method is called by the constructor and can be used in derived classes for initialization.
◆ _sampleSolution()
|
overrideprotectedvirtual |
This method should deliver solution sample out of the set of possible solutions.
Reimplemented from VirtualRobot::AdvancedIKSolver.
◆ getDifferentialIK()
| DifferentialIKPtr VirtualRobot::GenericIKSolver::getDifferentialIK | ( | ) |
◆ setJointsRandom()
|
protected |
◆ setupJacobian()
| void VirtualRobot::GenericIKSolver::setupJacobian | ( | float | stepSize, |
| int | maxLoops | ||
| ) |
◆ setupTranslationalJoint()
| void VirtualRobot::GenericIKSolver::setupTranslationalJoint | ( | RobotNodePtr | rn, |
| float | initialValue | ||
| ) |
◆ setVerbose()
| void VirtualRobot::GenericIKSolver::setVerbose | ( | bool | enable | ) |
◆ solve() [1/3]
|
overridevirtual |
This method solves the IK up to the specified max error. On success, the joints of the the corresponding RobotNodeSet are set to the IK solution.
- Parameters
-
globalPose The target pose given in global coordinate system. selection Select the parts of the global pose that should be used for IK solving. (e.g. you can just consider the position and ignore the target orientation) maxLoops How often should we try.
- Returns
- true on success
Implements VirtualRobot::AdvancedIKSolver.
◆ solve() [2/3]
|
overridevirtual |
This method solves the IK up to the specified max error. On success, the joints of the the corresponding RobotNodeSet are set to the IK solution.
- Parameters
-
object The grasps of this object are checked if the stored TCP is identical with teh TCP of teh current RobotNodeSet, and the an IK solution for one of remaining grasps is searched. selection Select the parts of the global pose that should be used for IK solving. (e.g. you can just consider the position and ignore the target orientation) maxLoops How often should we try.
- Returns
- On success: The grasp for which an IK-solution was found, otherwise an empty GraspPtr
Reimplemented from VirtualRobot::AdvancedIKSolver.
◆ solve() [3/3]
|
overridevirtual |
Reimplemented from VirtualRobot::AdvancedIKSolver.
◆ trySolve()
|
protected |
Field Documentation
◆ coordSystem
|
protected |
◆ initialTranslationalJointValue
|
protected |
◆ invJacMethod
|
protected |
◆ jacobian
|
protected |
◆ jacobianMaxLoops
|
protected |
◆ jacobianStepSize
|
protected |
◆ translationalJoint
|
protected |
