Data Structures | |
| struct | Color |
| struct | PhongMaterial |
Public Member Functions | |
| VisualizationFactory ()=default | |
| virtual | ~VisualizationFactory ()=default |
| virtual void | init (int &, char *[], const std::string &) |
| virtual VisualizationNodePtr | getVisualizationFromPrimitives (const std::vector< Primitive::PrimitivePtr > &, bool=false, Color=Color::Gray()) |
| virtual VisualizationNodePtr | getVisualizationFromFile (const std::string &, bool=false, float=1.0f, float=1.0f, float=1.0f) |
| virtual VisualizationNodePtr | getVisualizationFromFile (const std::ifstream &, bool=false, float=1.0f, float=1.0f, float=1.0f) |
| virtual VisualizationNodePtr | createBox (float, float, float, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createLine (const Eigen::Vector3f &, const Eigen::Vector3f &, float=1.0f, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createLine (const Eigen::Matrix4f &, const Eigen::Matrix4f &, float=1.0f, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createSphere (float, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createCircle (float, float, float, float=1.0f, float=0.5f, float=0.5f, size_t=30) |
| virtual VisualizationNodePtr | createTorus (float, float, float=1.0f, float=0.5f, float=0.5f, float=0.5f, float=0.0f, int=8, int=30) |
| virtual VisualizationNodePtr | createCircleArrow (float, float, float=1, float=0.5f, float=0.5f, float=0.5f, float=0.0f, int=8, int=30) |
| virtual VisualizationNodePtr | createCylinder (float, float, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createCoordSystem (float=1.0f, std::string *=NULL, float=100.0f, float=3.0f, int=10) |
| virtual VisualizationNodePtr | createBoundingBox (const BoundingBox &, bool=false) |
| virtual VisualizationNodePtr | createVertexVisualization (const Eigen::Vector3f &, float, float, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createTriMeshModelVisualization (const TriMeshModelPtr &, const Eigen::Matrix4f &, float=1.0f, float=1.0f, float=1.0f) |
| virtual VisualizationNodePtr | createTriMeshModelVisualization (const TriMeshModelPtr &, bool, const Eigen::Matrix4f &, bool=true) |
| virtual VisualizationNodePtr | createPlane (const Eigen::Vector3f &, const Eigen::Vector3f &, float, float, float=0.5f, float=0.5f, float=0.5f) |
| virtual VisualizationNodePtr | createPlane (const MathTools::Plane &plane, float extend, float transparency, float colorR=0.5f, float colorG=0.5f, float colorB=0.5f) |
| virtual VisualizationNodePtr | createArrow (const Eigen::Vector3f &, float=50.0f, float=2.0f, const Color &=Color::Gray()) |
| virtual VisualizationNodePtr | createTrajectory (TrajectoryPtr, Color=Color::Blue(), Color=Color::Gray(), float=15.0f, float=4.0f) |
| virtual VisualizationNodePtr | createText (const std::string &, bool=false, float=1.0f, Color=Color::Black(), float=20.0f, float=20.0f, float=0.0f) |
| virtual VisualizationNodePtr | createEllipse (float, float, float, bool=true, float=4.0f, float=8.0f) |
| virtual void | applyDisplacement (VisualizationNodePtr, Eigen::Matrix4f &) |
| virtual VisualizationNodePtr | createVisualization () |
| virtual VisualizationNodePtr | createUnitedVisualization (const std::vector< VisualizationNodePtr > &) const |
| virtual void | cleanup () |
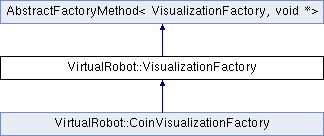
 Public Member Functions inherited from AbstractFactoryMethod< VisualizationFactory, void *> Public Member Functions inherited from AbstractFactoryMethod< VisualizationFactory, void *> | |
| void | setDescription (const std::string &newDescription) |
| std::string | getDescription () const |
Additional Inherited Members | |
| Public Types inherited from AbstractFactoryMethod< VisualizationFactory, void *> | |
| typedef std::shared_ptr< VisualizationFactory >(* | initialisationFunction) (void *) |
| Static Public Member Functions inherited from AbstractFactoryMethod< VisualizationFactory, void *> | |
| static std::shared_ptr< VisualizationFactory > | fromName (const std::string &name, void * params) |
| static std::shared_ptr< VisualizationFactory > | first (void * params) |
| static std::string | getName () |
| static std::shared_ptr< VisualizationFactory > | createInstance (void *) |
| static void | registerClass (const std::string &name, initialisationFunction init) |
| static std::vector< std::string > | getSubclassList () |
Constructor & Destructor Documentation
◆ VisualizationFactory()
|
default |
◆ ~VisualizationFactory()
|
virtualdefault |
Member Function Documentation
◆ applyDisplacement()
|
inlinevirtual |
Move local visualization by homogeneous matrix m. (MM)
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ cleanup()
|
inlinevirtual |
Here, a manual cleanup can be called, no Coin3D access possible after this. Usually no need to call cleanup explicitly, since cleanup is performed automatically at application exit.
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createArrow()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createBoundingBox()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createBox()
|
inlinevirtual |
A box, dimensions are given in mm.
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createCircle()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createCircleArrow()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createCoordSystem()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createCylinder()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createEllipse()
|
inlinevirtual |
Creates an coordinate axis aligned ellipse
- Parameters
-
x The extend in x direction must be >= 1e-6 y The extend in y direction must be >= 1e-6 z The extend in z direction must be >= 1e-6 showAxes If true, the axes are visualized axesHeight The height of the axes (measured from the body surface) axesWidth The width of the axes.
- Returns
- A VisualizationNode containing the visualization.
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createLine() [1/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createLine() [2/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createPlane() [1/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createPlane() [2/2]
|
inlinevirtual |
◆ createSphere()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createText()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createTorus()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createTrajectory()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createTriMeshModelVisualization() [1/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createTriMeshModelVisualization() [2/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createUnitedVisualization()
|
inlinevirtual |
Create a united visualization.
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createVertexVisualization()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ createVisualization()
|
inlinevirtual |
Create an empty VisualizationNode.
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ getVisualizationFromFile() [1/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ getVisualizationFromFile() [2/2]
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ getVisualizationFromPrimitives()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
◆ init()
|
inlinevirtual |
Reimplemented in VirtualRobot::CoinVisualizationFactory.
